近日,我校自动化学院智能机器人系统实验室赖旭芝教授团队在《Nature》子刊《Nature Communications》上发表重要研究成果:Humanoid finger with rigid-flexible-soft structure,我校自动化学院为第一完成单位。该研究设计了一款刚-柔-软结构仿人手指,融合了多种材料的优势,兼具稳定性与安全性,同时保持了结构的紧凑性与简洁性。

如今,设计一种兼具刚性手指的高承载能力与柔性手指的灵活性和安全性,同时保持结构简单且适用范围广,尤其适用于超薄或超脆物体的仿生手指,仍是一项具有挑战性的任务。本研究受人类手指刚柔并济结构(图1a)的启发,设计了一款刚-柔-软结构仿人手指(图1b)。
所设计的仿人手指由刚性管状骨骼、柔性关节弹簧、气动薄膜驱动器和软体硅胶皮肤组成(图1c),刚性管状骨骼与柔性关节弹簧的结合确保了该仿人手指的刚度和稳定性,同时实现了结构的简单和轻便。同时,它赋予仿人手指出色的抗非自然变形能力。在此基础上,紧密包裹在刚性管状骨骼上的气动膜驱动器使仿人手指具有类似人手的柔顺输出力,且不占用额外空间。覆盖在外层的软硅胶皮肤进一步增强了仿人手指的耐用性、平滑度和安全性。
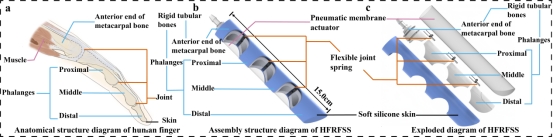
图1 仿照人类手指的刚-柔-软结构设计
研究团队通过大量实验验证了装有该仿人手指的抓持器在广泛的质量、硬度、尺寸和形状范围内具有卓越的抓取能力。图2a至2d展示了双指抓持器逐步抓取越来越重的物体,从轻柔地抓取12.1克的小番茄开始,最终成功抓取了重达1125.2克的3D 打印耗材。同样,图2e至2h表明三指抓持器不仅能轻柔地抓取14.7克的生鸡蛋黄而不损坏,还能牢牢地握住1254.5克的卷心菜。此外,图2i至 2l展示了双指抓持器从抓取0.01厘米厚的A4纸到抓取25.0厘米长的3D打印棒的过程,而图2m至2p则展示了三指抓持器抓取从0.6厘米直径的铅笔到24.3厘米大的柔软且易破的气球等不同物体的能力。

图2 装有仿人手指的抓持器抓取不同重量、硬度、形状和大小的物体
在体现精细操作能力的实验中,使用装有该仿人手指的抓持器的双指抓持器对一块质地柔软、极易破损的豆腐进行了反复抓取测试(图3)。实验中,抓持器轻柔而稳定地将豆腐从平台上拾起,后又准确放回,连续重复20次均未造成任何破损或碎裂。通过表面观察和称重分析发现,抓取前后豆腐几乎无质量损失(仅减少0.06克,不足其初始质量的1.5‰),表面也未留下明显压痕。这一结果充分验证了该仿人手指在操控超软、易碎物体时卓越的顺应性与稳定性,展现了其接近人类手指般的细腻操控能力,为机器人在食品处理、医疗护理等高敏场景中的应用提供了坚实的技术支撑。

图3 装有仿人手指的抓持器连续抓取豆腐(GIF图片经过加速)
在体现高适应性精细操作能力的实验中,使用装有该仿人手指的抓持器的双指抓持器对一片易碎的薯片进行了多角度抓取测试(图4)。实验中,抓持器从水平、倾斜到垂直等多种姿态下对静置于平台上的薯片实施抓取。尽管薯片质地薄脆、极易断裂,机械手指仍能通过自适应变形有效贴合薯片曲面,并施加柔顺的夹持力,成功实现多次无损抓取与放置。整个过程中薯片完整无裂纹,未发生破碎或掉落。该实验充分展示了所设计的仿人手指在非结构化环境中对超脆性物体的高顺应性柔顺抓取能力,凸显了其在精细操作领域的广阔应用潜力。

图4 装有仿人手指的抓持器从多角度抓取薯片(GIF图片经过加速)
在真实生物操作场景的实验中,使用装有该仿人手指的抓持器的三指抓持器抓取并安全转移了一只活体青蛙(图5)。实验中,三指抓持器轻柔地从水中接近一只体长约5厘米的金线蛙,精准闭合指尖,稳稳将其托起,平稳移动至另一水箱后缓缓松开,整个过程流畅自然,未对青蛙造成任何伤害,使其安全回归水中。这一实验不仅充分展现了该仿人手指卓越的安全性,避免对脆弱生物造成损伤;更关键的是,得益于仿人手指的无电化设计,其在与水接触的操作中充分展现了出色的防水性能。

图5 装有仿人手指的抓持器转移活体青蛙
刚-柔-软结构仿人手指结构简洁、成本低廉,能够在复杂环境中实现对多种物体稳定、安全且灵巧的抓取,不仅展现出优异的适应性与可靠性,有望成为人类手指的有效替代方案,也为医疗康复、智能服务、智慧农业等需应对多样化、复杂任务的机器人应用领域开辟了新的可能。

图6 装有刚-柔-软结构手指的仿人机械手及其负重能力
该研究由中国地质大学(武汉)自动化学院“智能机器人系统实验室”研究团队完成(团队负责人:赖旭芝教授;团队成员:王亚午教授,孟庆鑫教授,吴俊东教授,张盼副教授,闫泽副教授)。近年来,由赖旭芝教授领衔的“智能机器人系统”研究团队,开展了一系列先进智能机器人设计、建模与控制方法的研究,实验室研究范围涵盖气动机器人,介电弹性体机器人,磁驱动机器人,液态金属机器人等诸多科研项目。(通讯员:吕播阳 孟庆鑫)
图7 我校自动化学院“智能机器人系统实验室”研究团队
第一排左六为赖旭芝教授,第二排左一为王亚午教授,第三排左一为孟庆鑫教授
第一排左二为吴俊东教授,第一排右一为张盼副教授,第一排左五为闫泽副教授
论文链接:https://www.nature.com/articles/s41467-025-65367-x




